近日,课题组在基于柔性FET的触觉传感器领域取得重要进展。相关综述成果以 “Intelligent Tactile Perception Revolution: Innovations in Flexible FET-Based Tactile Sensors for Next-Gen Human-Machine Interfaces”为题,发表于材料科学领域国际顶级期刊《Advanced Materials》(IF=27.4)。郑州大学曾龙辉教授、上海大学李梦姣教授及王标教授为共同通讯作者,郑州大学物理学院为主要通讯单位。
在人形机器人、可穿戴设备等智能技术快速发展的背景下,传统触觉传感器面临灵敏度不足、信号串扰严重、集成密度低等瓶颈,难以满足高精度人机交互需求。FET凭借可控的载流子传输特性和独特的信号放大功能,为高性能触觉传感技术提供了理想平台。然而,如何通过器件、材料与工艺的协同创新,实现灵敏度、拉伸性、分辨率等关键性能的精准调控,仍是该领域的核心挑战。
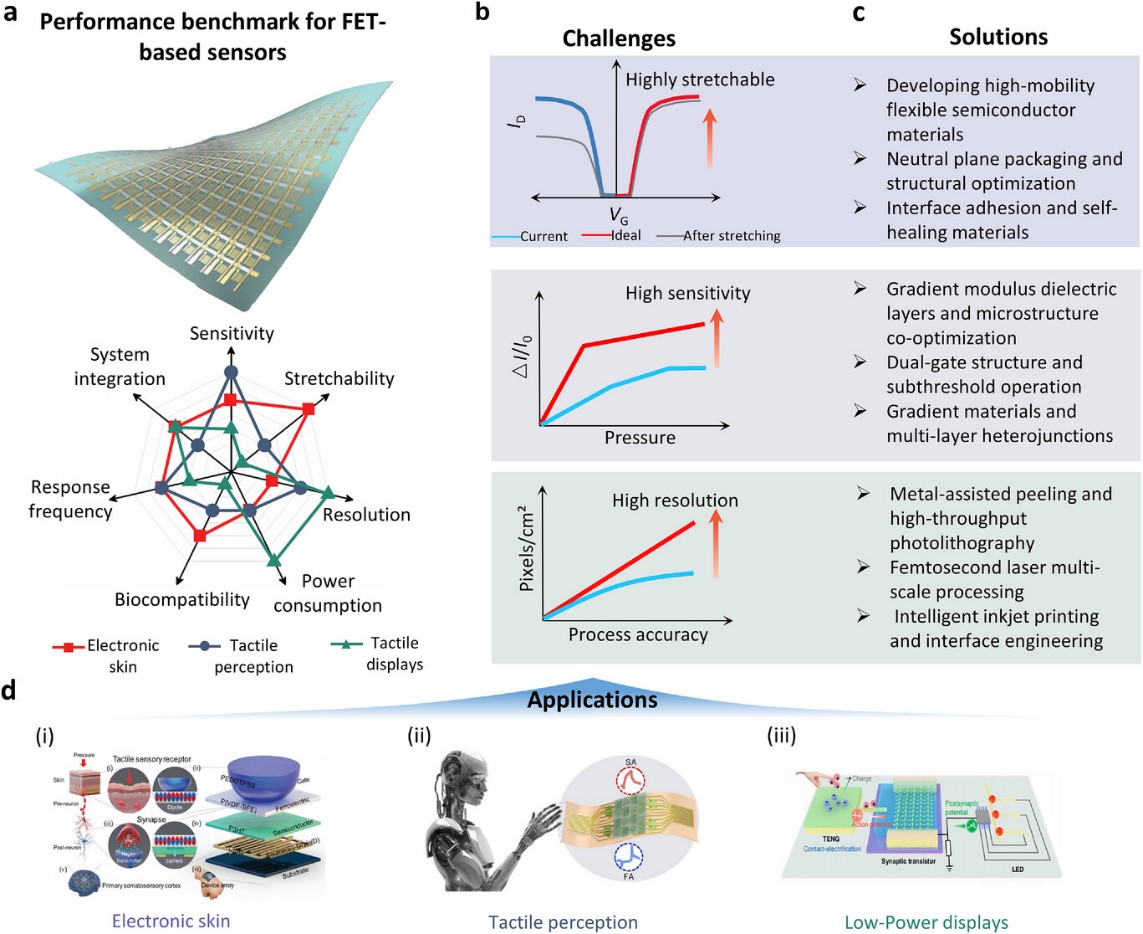
图:未来高性能场效应晶体管触觉传感系统的发展方向与挑战。
针对这一问题,研究团队系统探索了四种核心传感机制(摩擦电、压电、压阻、电容)与FET的集成策略,构建了多元化的传感器设计体系。通过材料和结构协同作用,选用石墨烯、碳纳米管、二维过渡金属硫族化合物等高能谷迁移率材料作为沟道层,结合双栅极结构、垂直异质结等创新器件架构,显著提升了传感器的信号放大效率。采用CNT/PDMS复合沟道与离子凝胶介质层的组合方案,兼顾了高迁移率与机械柔韧性,为可穿戴电子皮肤的开发提供了关键技术支撑。此外,借助光刻、飞秒激光微加工、喷墨打印等先进制造技术,成功实现了传感器的高分辨率图案化与大面积集成,满足了不同应用场景的定制化需求。该类传感器在可穿戴、仿生触觉感知系统、智能触觉显示器等领域展现出广阔应用前景。在生物医学领域,可实现脉搏、眼压等微弱生理信号的精准监测;在机器人研究技术中,能为机械臂提供高精度触觉反馈,提升复杂操作的稳定性;在虚拟现实场景下,可通过触觉视觉闭环反馈,增强交互沉浸感。
此项研究通过跨学科的材料创新、结构设计与系统集成,建立了基于柔性FET的触觉传感器的性能优化,为下一代智能人机交互系统的开发提供了重要理论指导与技术支撑。
该研究工作得到了国家重点研发计划、国家自然科学基金、上海市自然科学基金等项目的资助。
论文链接:https://doi.org/10.1002/adma.202510646
