近日,本课题组曾龙辉教授联合上海大学、清华大学、台湾中兴大学、华东师范大学与南京邮电大学科研团队,在仿生夜视感知与范德华光电器件集成方向取得新进展。相关研究成果以“Owl-Inspired Adaptive Scotopic Vision Enabled by van der Waals Optoelectronic Heterointegration”为题,发表于国际知名期刊《Laser & Photonics Reviews》(IF=10.0)。郑州大学物理学院作为该论文的主要通讯单位,曾龙辉教授为共同通讯作者。
夜间和弱光环境下的视觉感知是智能系统面临的关键挑战之一。传统光电传感器在弱光条件下存在着信噪比下降、识别准确率降低等问题;同时,感知与计算单元分离的架构也会带来较高能耗和效率损失。自然界中,猫头鹰依靠高密度视杆细胞、分级视网膜处理机制以及随环境光变化而动态调节的视觉系统,能够在近乎黑暗的环境中实现高效捕猎。这一生物机制为发展新型低功耗、高灵敏、场景自适应视觉硬件提供了重要启发。
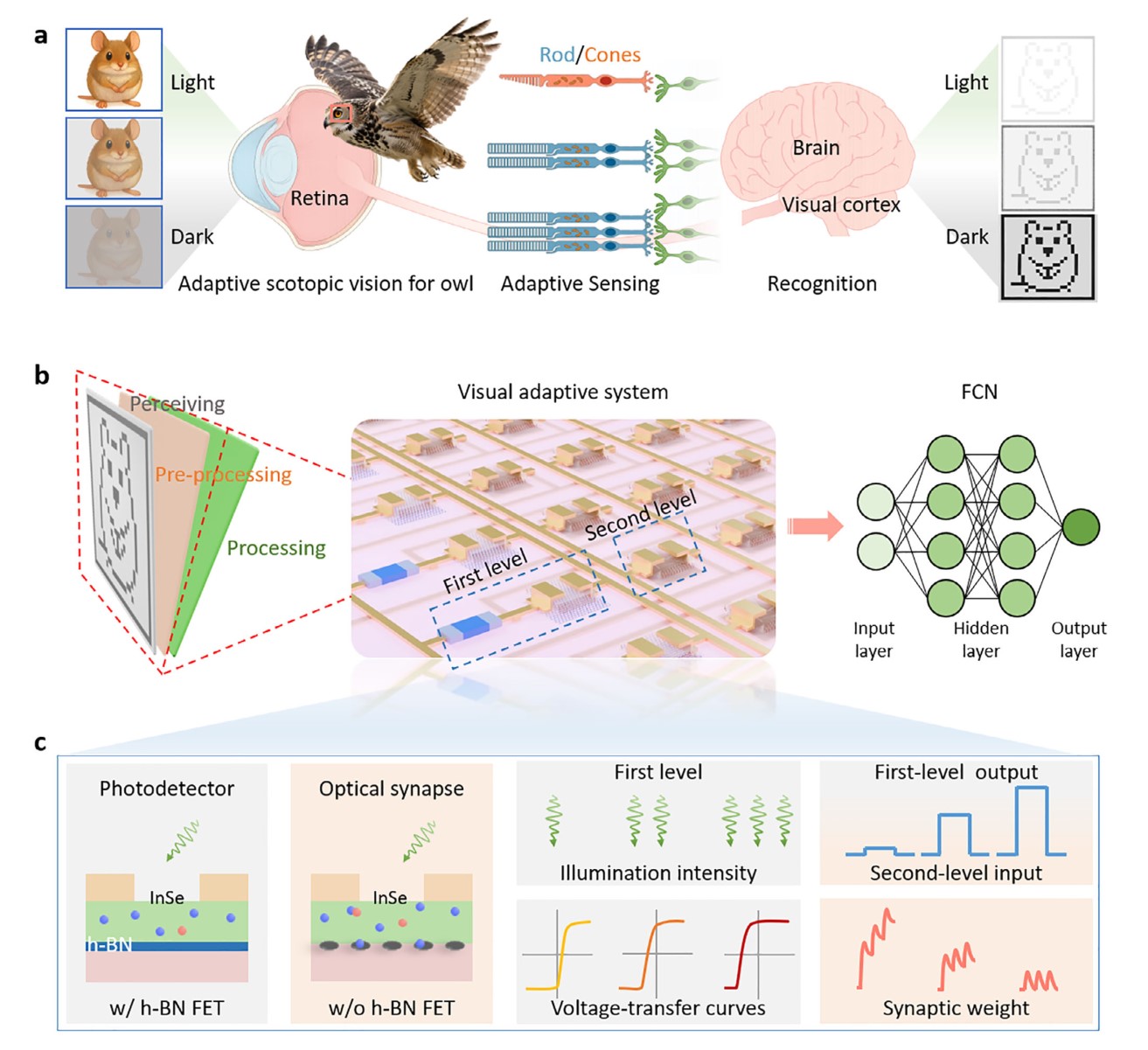
图1.基于二维InSe范德华异质集成的猫头鹰启发式的自适应暗视觉系统
针对上述问题,本研究提出了一种范德华异质集成的猫头鹰启发式的自适应暗视觉系统。该系统基于二维InSe范德华光电子器件,通过界面工程调控电荷俘获与释放行为,使器件同时实现光探测和光突触两类功能。其中,引入h-BN界面层的InSe光电晶体管表现出优异的光探测性能,响应度达到104 A W-1,比探测率达到1011 Jones,并实现8.57/7.64 μs的快速上升/下降响应;未引入h-BN的InSe光电晶体管则表现出明显的持续光电导效应和丰富的突触可塑性,可模拟视觉突触中的短时程和长时程记忆行为。在此基础上,研究团队构建了由“场景感知光探测电路—6×6光突触阵列—全连接神经网络”组成的三层仿生视觉系统。其中,第一层光探测电路用于感知环境光照变化,并将光照信息转化为电压信号;第二层光突触阵列根据该信号动态调节突触权重,实现图像特征预处理;第三层神经网络完成图像分类识别。实验结果表明,该系统能够在0–100 mW cm-2的不同光照条件下动态调节学习效率,并实现88.6%的识别准确率,展现出类似猫头鹰暗视觉的场景适应能力。该工作将二维范德华光电器件的界面可调控特性与仿生视觉计算机制相结合,为夜间自主驾驶、低照度成像和下一代智能机器视觉提供了器件与系统设计思路。
该项研究工作得到了国家科技部重点研发计划、国家自然科学基金以及江苏省基础研究计划的共同资助。
论文链接:https://doi.org/10.1002/lpor.71379
