机械发光(ML)传感作为一种有前景的可见触觉传感方法,已引起广泛关注。基于ML的传感器无需外部电源或复杂电路即可将机械力转化为光,从而实现对机械刺激的空间分辨映射。这种自供电、可视化的功能特性使ML传感器成为触觉传感的有力候选者。然而,其相对较高的激活力阈值仍然是一个挑战,限制了对微弱机械刺激的检测。尽管Tu等人通过紫外光预辐照实现了零阈值应力传感,但其对外部光源的依赖限制了实际应用。迄今为止,开发无需预辐照、低阈值且高灵敏度的ML触觉传感器的有效方法仍存在迫切需求。
在自然界中,高纵横比的机械敏感感觉器官,如触须、纤毛和神经丘,对微小的压力变化表现出卓越的响应能力。受这些生物机械感觉器官的启发,研究人员已开发出具有超低检测限的类毛状电子皮肤(E-skin)和电子触须。迄今为止,已报道了多种设计精良的基于ML的触觉传感器,其ML灵敏度和检测限均得到改善。例如,受犬齿生物力学启发,设计了一种具有增强ML信号灵敏度的棒状阵列传感器。精心设计的结构可在特定区域诱导应力集中,从而增强这些区域的ML亮度。然而,大多数已报道的基于ML的传感器仍表现出相对较高的检测限;并且结构参数与ML性能之间的关系仍未得到充分研究。
深入理解ML传感特性对于准确模拟生物皮肤的感知能力至关重要。迄今为止,已开发出多种多模式电学触觉传感器,选择性地响应静态和动态压力,以模拟皮肤的机械感受器,即慢适应性(SA)感受器(梅克尔盘和鲁菲尼小体)和快适应性(FA)感受器(迈斯纳小体和环层小体)。这些传感器通过识别柔软度、纹理和微形态等参数,有助于实现全面的物体识别。基于ML的传感因其对动态机械刺激的灵敏和选择性响应,在动态力成像方面具有巨大的应用潜力;然而,其潜在的传感特性仍未得到充分探索。ML被认为源于摩擦电致发光和压电诱导的载流子脱陷。类似于对高频振动刺激产生瞬态信号的摩擦电和压电传感器,基于ML的传感器也表现出类似的响应,表明它们能够模拟FA机械感受器。实时ML强度(I)与施加机械力的速率(∂F/∂t)之间的关系可描述为:

其中,α是将应变耦合到发光的常数,F 是施加的力,A 是ML传感器的横截面积,t是时间,τ是ML的寿命。这表明ML强度(I)与施加应力的速率(∂F/∂t)相关。因此,基于ML的传感器能够选择性地响应动态力,例如高频振动。深入理解ML传感特性对于解锁其在电子皮肤(E-skin)领域的新应用(如纹理和微形态识别)至关重要。
受人类皮肤类毛结构和皮肤机械感受器的启发,郑州大学单崇新教授、董林教授联合深圳大学彭登峰教授团队采用磁场辅助策略结合模板法,制备了一种仿生ML微纤毛阵列(MLMCA)薄膜。该MLMCA具有高度可调的纵横比(范围从5.6到12.5)和ML强度。有限元分析表明,微纤毛内部的应力分布与其结构参数密切相关。优化后的MLMCA对施加的力表现出高灵敏度,并实现了仅10 mN的显著超低激活阈值——这是迄今为止报道的最低值。该MLMCA能够通过选择性地响应动态力来模拟皮肤的FA机械感受器。在此基础上,我们通过将基于ML的触觉传感器与用于图像分析的机器学习相结合,实现了纹理和盲文点识别,准确率分别高达99.95%和96.74%。此外,还开发了一种基于ML传感的盲文到语音转换系统。这些高性能的基于ML的触觉传感器是下一代电子和光学触觉传感系统的有力候选者。
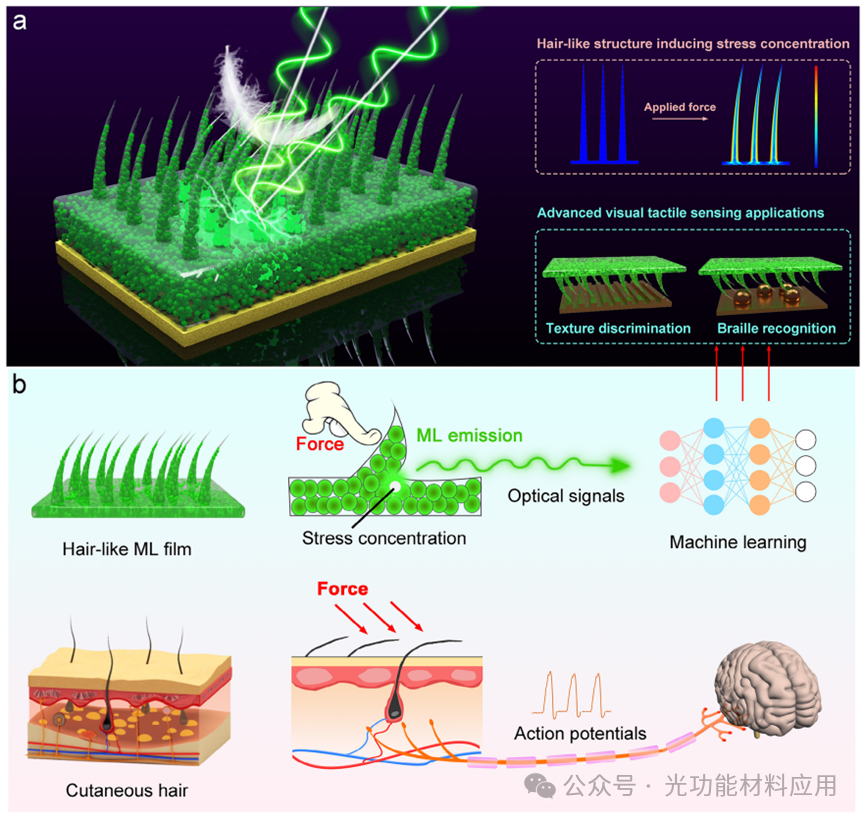
图1.毛发状MLMCA触觉感应原理图。
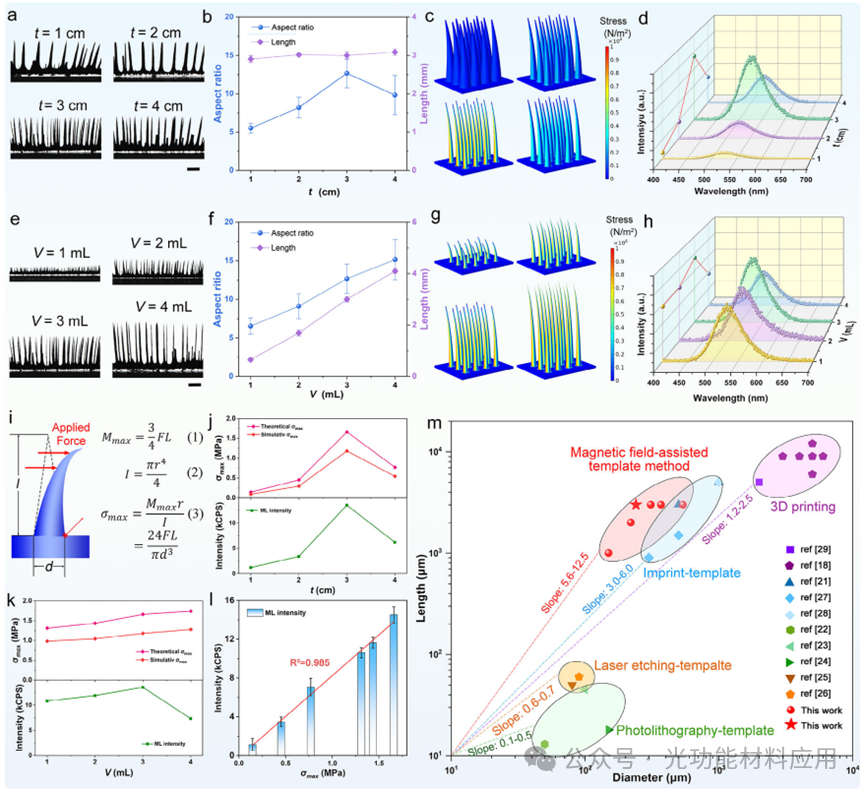
图2.高度可调的 MLMCA 长宽比和 ML 强度。
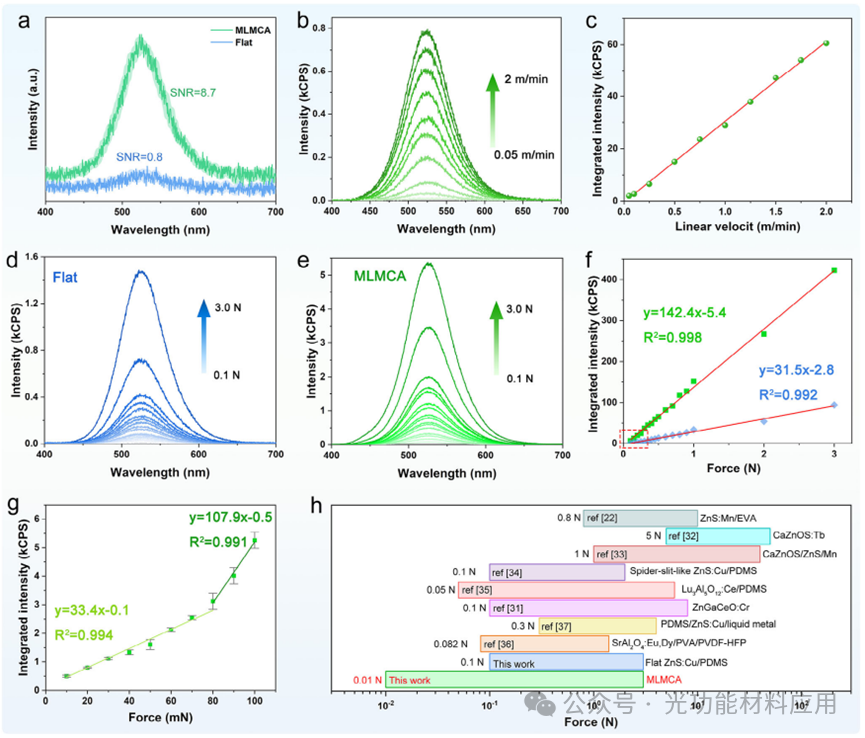
图3.MLMCA的ML性能。
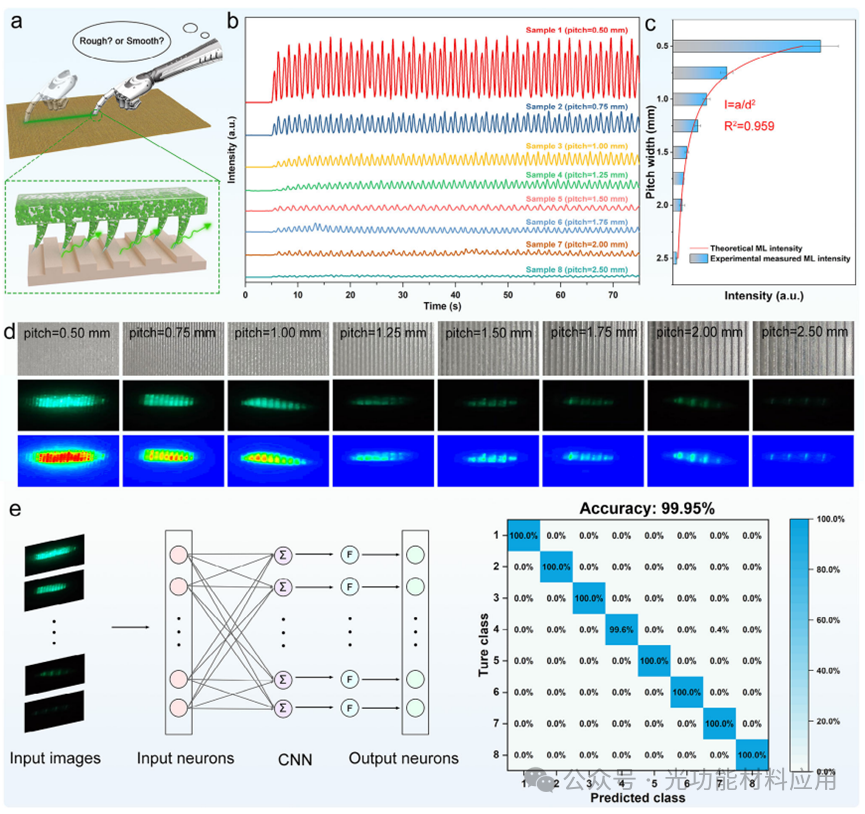
图4.MLMCA用于纹理识别。
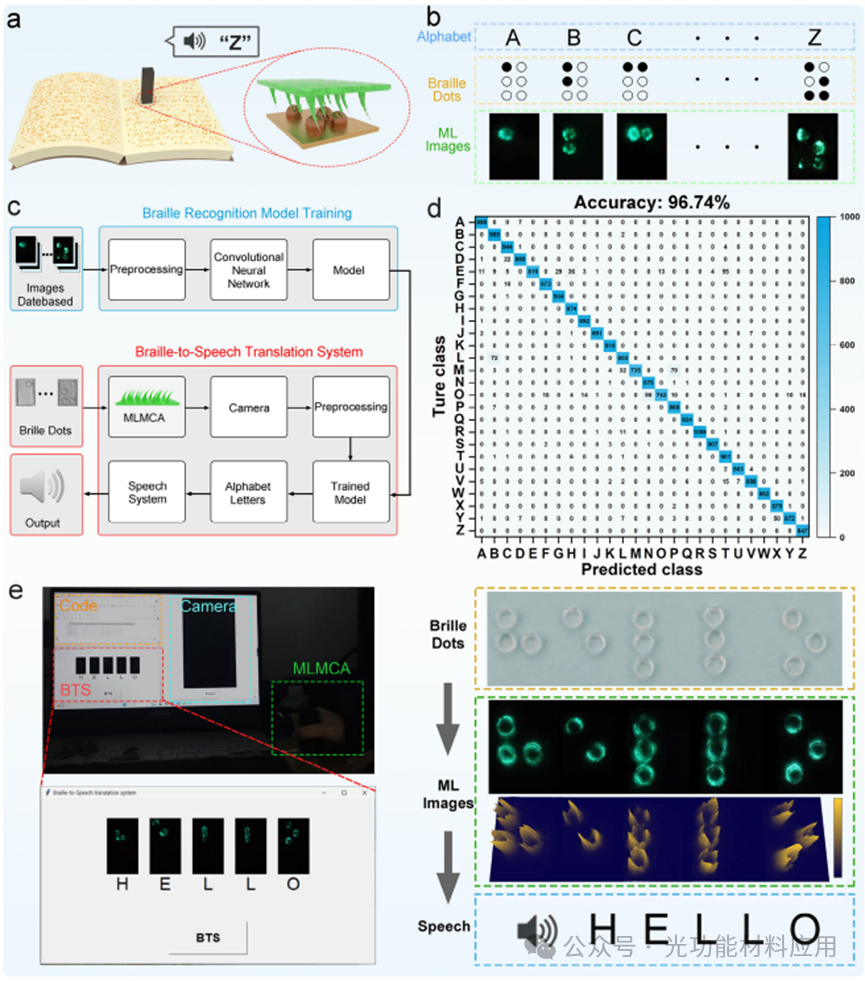
图5.基于ML的盲文语音翻译系统。
文章链接:
https://advanced.onlinelibrary.wiley.com/doi/10.1002/adma.202507634


